Programme de recherche 1 - Reconnaissance et surveillance
Le programme de recherche « Reconnaissance et surveillance » du domaine de compétences Sciences et technologies d’armasuisse traite de quatre champs de compétences axés sur les capacités dans les domaines ISTAR (Intelligence, Surveillance, Target Acquisition and Reconnaissance) et Contre-mesures. Il fait la démonstration de nouvelles opportunités en matière d’acquisition d’informations, de camouflage, de leurrage et de brouillage à l’aide d’un réseau de coopération multilatéral. armasuisse S+T mettra à profit les nouvelles connaissances technico-scientifiques acquises pour réaliser des expertises, des essais, des démonstrations technologiques et des projets d’innovation au profit de l’Armée suisse.
À l’avenir, les informations déterminantes pour la prise de décision pourront être obtenues de manière plus rapide, plus précise et automatisée, même en conditions difficiles, par exemple par mauvaise visibilité ou en cas de brouillage, et ce pour de multiples raisons. Par rapport à aujourd’hui, le développement en matière d’algorithmes intelligents et de puissances de calcul permettra une meilleure identification, une meilleure poursuite et la classification automatique des cibles, notamment grâce à des technologies radar plus avancées pour la surveillance de l’espace aérien. Les derniers progrès dans le domaine des technologies radar cognitives, multistatiques et multifonctionnelles permettent une détection améliorée des cibles aériennes sur la base d’informations issues de l’environnement. Les algorithmes intelligents jouent également un rôle important dans la fusion de données de multiples capteurs et d’informations en vue d’établir un tableau pertinent de la situation.
Le champ de bataille moderne est de plus en plus transparent. La reconnaissance et la surveillance sont assurées par des drones, des satellites, des robots terrestres, des plateformes de reconnaissance avec occupants, des soldats et des capteurs distants. Les nouvelles technologies de capteur promettent une amélioration sensible dans l’exploitation des informations. Ainsi, les futurs radars compacts hyperspectraux et à synthèse d’ouverture (SAR) devraient pouvoir détecter les camouflages et distinguer les cibles réelles des leurres. En outre, le degré d’automatisation et l’autonomie des détecteurs déportés s’améliorent progressivement.
Les progrès du domaine des semi-conducteurs et de l’électronique permettent de miniaturiser les appareils de reconnaissance et ouvrent de nouvelles possibilités dans ce domaine. Par exemple, des détecteurs hypersensibles, dits « quantiques », se montrent capables de détecter des objets au-delà des coins. De même, des systèmes de caméras spéciales à commutation rapide démontrent qu’ils ont le potentiel de détecter et poursuivre des objets volant à très grande vitesse et à faible altitude. Une identification est possible même face au soleil et avec un faible contraste visuel entre la cible et l’arrière-plan.
Les mesures de camouflage et de leurrage gagnent en importance, que ce soit pour les engagements tactiques sur le champ de bataille ou comme contre-mesure dans le cadre de la reconnaissance stratégique. Le besoin de solutions techniques innovantes augmente, par exemple pour faire face aux nouvelles menaces telles que la reconnaissance par drones et par satellites. Il sera donc nécessaire à l’avenir de camoufler le matériel et les troupes contre les systèmes de reconnaissance dotés de l’intelligence artificielle (IA). Des leurres multispectraux, ayant des signatures similaires à celles de cibles réelles dans le spectre visible, infrarouge et radar, seront également davantage mis en œuvre.
Pour toutes ces raisons, les progrès technologiques actuels ont une incidence sur les limites de futurs moyens de reconnaissance et de surveillance. Toutefois, des questions subsistent quant aux limites de performance et aux possibilités d’application réelles. C’est pourquoi les principaux objectifs du programme de recherche sont les suivants :
identifier et évaluer les technologies pertinentes et les tendances en matière d’acquisition d’informations (IMINT, RADINT, MASINT, ACCOUSTINT, SAR, GEOINT) ainsi que les contre-mesures sous forme de guerre électronique, de camouflage et de leurrage ;
mettre en avant et faire la démonstration de nouvelles possibilités technologiques ;
réunir les bases et les connaissances techniques nécessaires au conseil, à l’expérimentation et aux expertises.
Les progrès des technologies des antennes, des hautes fréquences, des semi-conducteurs, des algorithmes, des circuits intégrés et des réseaux permettront d’accroître les performances des systèmes radar et fourniront de nouvelles applications. Les axes de recherche de ce champ de compétences ont trait aux systèmes radar cognitifs, multistatiques, multifonctionnels et en réseau, mais aussi aux contre-mesures intelligentes visant à réduire les interférences parasites. Ces perturbations peuvent être provoquées soit intentionnellement par d’autres d’acteurs depuis les airs ou le sol, soit de manière non intentionnelle par des objets au sol, comme des éoliennes. Les perturbations et les contre-mesures destinées à s’y opposer doivent faire l’objet d’une évaluation permanente. En ce qui concerne la multifonctionnalité des futurs systèmes radar, il est par exemple intéressant d’étudier comment réunir en un seul appareil les fonctionnalités radar et communication. Le champ de compétences Surveillance de l’espace aérien étudie par ailleurs l’incidence des derniers développements de la photonique sur les applications radar.
La détection, le suivi et l’identification des drones et des essaims de drones dans des environnements complexes, par exemple dans des situations où il est difficile de distinguer les drones de l’arrière-plan ou lors de la reconnaissance mobile, jouent également un rôle important. Les bases sont établies à travers des capteurs de recherche spéciaux, des expériences et des mesures de signatures radar.
Les caméras d’imagerie visuelles et électro-optiques montrent leurs limites en cas de reconnaissance sur de longues distances. Cette limitation s’explique par les propriétés de l’atmosphère, par exemple l’atténuation due à la présence de vapeur d’eau et d’aérosols. En revanche, les capteurs radar d’imagerie à synthèse d’ouverture (SAR) peuvent fournir des images de reconnaissance de la Terre à haute résolution sur de longues distances, même en présence de nuages, de brume dense et de fumée, et ce à toute heure du jour et de la nuit. Les développements technologiques récents vont vers la réalisation d’appareils SAR compacts montés sur des drones et des satellites. Cependant, une telle miniaturisation implique toujours des compromis et des limites de performance en termes de reconnaissance et de surveillance. Ce point doit faire l’objet d’une évaluation constante. La recherche montre par ailleurs que l’utilisation de plusieurs antennes de réception ouvre la voie à de nouvelles applications, comme une meilleure détection des véhicules en mouvement. Les mesures SAR peuvent également délivrer des informations en 3D. Il convient d’évaluer les limites de performance de telles options. Des méthodes de guerre électronique contre la reconnaissance par SAR ainsi que des possibilités de soutien dans l’exploitation des images SAR sont également à l’étude. L’analyse repose sur des capteurs de recherche montés sur des drones et des avions, des données satellite et des simulations basées sur des modèles physiques.
La détection de positions camouflées est également capitale. Dans ce domaine, on s’intéresse aux capteurs hyperspectraux, de plus en plus utilisés sous forme compacte sur les drones et les satellites. Ces systèmes mesurent les propriétés des matériaux avec une haute résolution spectrale, même dans les spectres invisibles à l’œil humain. Il est ainsi possible de distinguer un filet de camouflage de couleur verte d’une végétation d’arrière-plan majoritairement verte. Des questions subsistent concernant les performances de reconnaissance, par exemple lorsque les conditions météorologiques ne sont pas optimales ou en présence de zones d’ombre. Un autre thème traité dans ce contexte est la réduction significative des données afin d’obtenir des résultats de reconnaissance pour ainsi dire en temps réel.
La surveillance de zones étendues est généralement assurée par des systèmes aériens et terrestres. Les systèmes de surveillance répartis au sol, dotés d’un haut degré d’automatisation et d’autonomie, jouent un rôle de plus en plus important dans ce domaine. Dans ce contexte, l’intégration d’une IA économe en énergie dans les unités de surveillance réparties est essentielle. On parle ici d’intelligence locale et de technologies « edge » et « tiny edge ». Il s’agit de circuits intégrés optimisés ainsi que de l’intégration d’algorithmes d’IA modernes nécessitant peu de puissance de calcul. Des systèmes de capteurs de ce type sont réalisés sous forme de démonstrateurs technologiques afin de déterminer leurs limites de performance.
Par ailleurs, ce champ de compétence traite de l’acoustique du champ de bataille moderne. Des systèmes de microphones intelligents prennent de plus en plus d’importance pour l’autoprotection ou la protection des plateformes et des infrastructures, ainsi que pour les missions de reconnaissance et de surveillance. Il importe donc d’examiner de nouvelles approches de détection et de localisation de détonations telles que des tirs, à l’aide par exemple de démonstrateurs technologiques montés sur des véhicules ou de dispositifs de détection répartis sur le terrain. Un autre thème porte sur la reconnaissance et la surveillance dans les zones bâties et urbaines, qui constituent un défi particulier du fait des conditions de visibilité limitées. L’utilisation de radars et de microphones dans de tels environnements est également un défi, car les réflexions rendent la détection des cibles plus difficile. C’est pourquoi la mise en réseau d’unités avec des distances de détection plus petites doit être étudiée. Cela implique également d’examiner de nouvelles possibilités comprenant des détecteurs ultrasensibles issus de la recherche, par exemple des détecteurs quantiques ou des caméras neuromorphiques.
Ce champ de compétences évalue tout d’abord des solutions technologiques de camouflage et de leurrage destinées à répondre aux nouvelles menaces, par exemple la reconnaissance automatisée par IA. Le camouflage contre la reconnaissance par IA repose sur des modèles de camouflage spéciaux et des méthodes issues du champ de recherche « Adversarial Camouflage ».
Le développement de leurres multispectraux est notamment au cœur du champ de compétences « Camouflage et leurrage ». Le but de ces leurres est d’imiter le plus fidèlement possible les signatures de cibles réelles dans le spectre visible, infrarouge et radar. Les recherches visent à optimiser les signatures en ajoutant des matériaux aux leurres. Des mesures en laboratoire et sur le terrain et des analyses avec des modèles physiques sont réalisées à cet effet.
Une connaissance approfondie des signatures des cibles, des matériaux et des arrière-plans est une condition essentielle pour pouvoir évaluer les mesures de camouflage multispectrales. Il est donc impératif de développer une méthodologie de mesure et de simulation des signatures et de l’adapter constamment aux dernières évolutions technologiques. Les mesures de signatures sont effectuées dans des conditions contrôlées en laboratoire ou dans un environnement naturel. Le comportement spectral de l’arrière-plan est enregistré sur une longue période à l’aide de nouvelles méthodes de mesure.
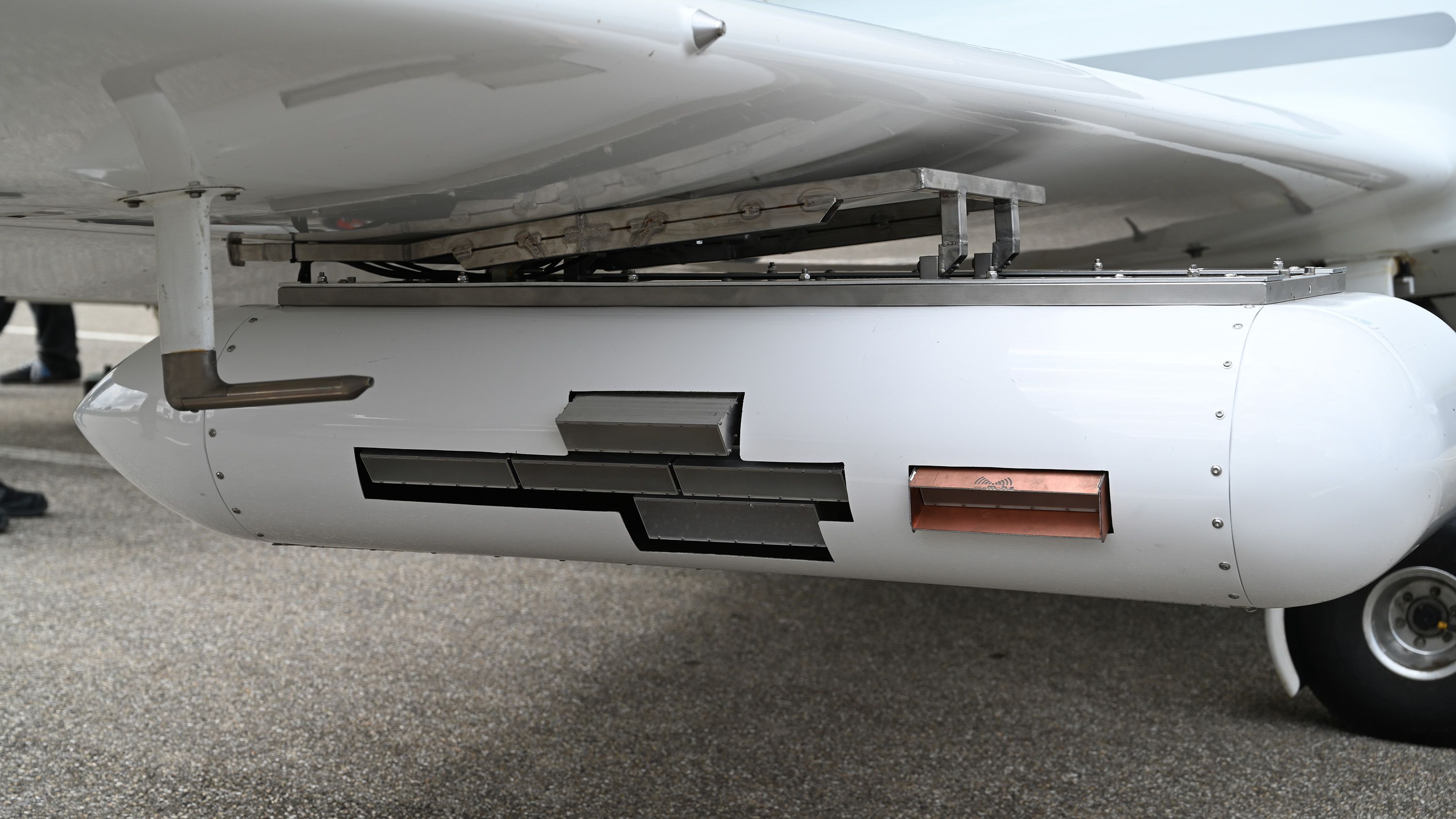
Le démonstrateur technologique MIRANDA-35 fournit des prises de vue aériennes du sol, y compris en cas de mauvaises conditions météorologiques (p. ex. couverture nuageuse ou pluie). Là où d’autres capteurs montrent déjà leurs limites et ne fournissent plus d’information utilisable, les images « quicklook », c’est-à-dire les images de télédétection générées dans l’avion en basse résolution immédiatement après la prise de vue, peuvent être transmises à une station au sol par ondes radio. À l’issue de la mission, les données de mesure enregistrées dans l’avion peuvent être converties en images avec une résolution de 10 cm. Ce démonstrateur technologique possède cinq canaux de réception permettant de déterminer les déplacements des cibles au sol et dans les airs, les propriétés polarimétriques des cibles terrestres, les changements les plus infimes, de même que les informations sur l’altitude du terrain et des grands objets.
Ce démonstrateur technologique comprend un hexacoptère, un câble d’alimentation et de données ainsi qu’une station au sol. Le drone se maintient typiquement à 80 m au-dessus du sol au bout d’un câble de 100 m pesant 1,6 kg, soit 16 grammes par mètre. La vitesse du transfert de données peut atteindre 40 Mbit/s. Le drone ajuste automatiquement ses rotors afin d’assurer un vol parfaitement stable et stationnaire. Il est également équipé d’un parachute de secours pour des raisons de sécurité. À l’heure actuelle, un système de stabilisation Gimbal est combiné à une caméra optique et infrarouge. L’utilisation de ce dispositif à des fins de reconnaissance et de surveillance a notamment été présentée à la troupe dans des contextes de détection des drones ou de missions de surveillance. La détection et le suivi automatique de cibles aériennes et terrestres seront étudiés au cours d’une étape ultérieure.
Quatre radars programmables de type « software-defined radio radar » sont pilotés par une unité centrale. Leur synchronisation repose sur les signaux GPS. Les axes de recherche suivants sont explorés à l’aide de ce démonstrateur :
-Ondes radar non linéaires - Réseaux radar : fusion des détections radar de plusieurs dispositifs - Algorithmes radar cognitifs - Technologie de « radar à bruit » : méthodes de camouflage des radars - Thématiques RADCOM : bases de la coexistence entre les radars et la communication - Approche multistatique des radars - Détection des drones en milieu urbain
Chaque nœud radar présente les caractéristiques suivantes : - Antennes : une antenne émettrice et deux antennes réceptrices - Modes de fonctionnement : onde entretenue à modulation de fréquence et formes d’onde programmables selon les besoins - Fréquence radar : 8,2 à 10,6 GHz - Largeur de bande : 160 MHz pour l’onde entretenue et 80 MHz pour les formes programmables - Puissance délivrée : 2 W / 20 W
La caméra acoustique équipée de 120 microphones permet de détecter et de localiser plusieurs sources de bruit en temps réel. Il peut notamment s’agir de la détection et de la localisation ou du suivi des bruits émis par les drones. Mesurées à l’aide de la caméra acoustique, les directions de l’azimut et de l’élévation des sources de bruit peuvent servir à l’orientation de capteurs supplémentaires (p. ex. caméra installée sur une plateforme orientable). La caméra acoustique est capable d’opérer une surveillance acoustique de l’environnement immédiat sur six fréquences au choix avec des bandes de fréquence individuelles.
Ce démonstrateur technologique, appelé étalonneur actif, permet d’amplifier la surface équivalente radar d’un drone. Un radar au sol détectant le drone l’interprètera comme un objet volant beaucoup plus grand. On peut également tester le radar au sol en faisant varier la surface équivalente radar.
Réseau
Le développement de compétences techniques repose sur un vaste réseau de partenaires issus du monde économique, de hautes écoles, d’universités et d’autres centres de recherche, en Suisse comme à l’étranger. Des contacts étroits sont en place et des informations sont échangées avec des utilisateurs et services de planification, d’acquisition et d’expérimentation du DDPS afin d’assurer la pertinence de l’affectation des capacités.