ARCHE 2023 - La robotica per i soccorsi in caso di calamità del futuro
Dal 10 al 14 luglio 2023 si è svolto l’evento «Advanced Robotic Capabilities for Hazardous Environments» (ARCHE), tenutosi per la prima volta nella Svizzera romanda presso Avully. L’appuntamento è frutto di una collaborazione tra il Centro svizzero dei droni e della robotica (CSDR) del DDPS, armasuisse Scienza e tecnologia, la Formazione d’addestramento del genio/salvataggio/NBC e il Politecnico di Zurigo. La piattaforma ARCHE mira a consentire l'acquisizione di conoscenze in merito alle applicazioni robotiche a beneficio dell’esercito e di ulteriori autorità con compiti di sicurezza nel campo dell’assistenza in caso di catastrofe, così come la valutazione degli interventi in questo ambito.
Anna Gervasoni e Fabio Winkelmann, settore specialistico Comunicazione, settore di competenza Risorse e Supporto

Quest’anno si è svolta la sesta edizione di ARCHE. Per la prima volta, tuttavia, l’evento si è tenuto presso il villaggio di esercitazione delle truppe del genio e di salvataggio Epeisses vicino a Ginevra, che offre una cornice ideale per portare avanti la ricerca applicata, testare i sistemi in un ambiente realistico e promuovere il confronto con i potenziali utenti. Ogni due anni viene organizzata una giornata dimostrativa (Demo-Day), in occasione della quale gli utenti attivi nel ramo dell’aiuto in caso di catastrofe hanno la possibilità di esaminare da vicino attività e sistemi. La data scelta per quest’anno è stata giovedì 13 luglio. Durante la mattinata gli ospiti invitati hanno potuto assistere a diverse conferenze tecniche sul tema della robotica. Nel pomeriggio gli ospiti e altri gruppi (tra cui per esempio i rappresentanti dei media) hanno avuto modo di confrontarsi con i ricercatori e vedere in azione i sistemi robotici. Il presente articolo si concentra su cinque sistemi selezionati facenti capo a progetti di ricerca di armasuisse Scienza e tecnologia.
Rilevamento di sostanze nocive e salvataggio di persone (Bird AI + Boar AI)
Il sistema presentato dalla Scuola universitaria professionale dei Grigioni rappresenta la combinazione del drone Bird AI e del veicolo cingolato Boar AI. Il suo obiettivo è quello di fare in modo che drone e veicolo interagiscano consentendo per esempio il rilevamento di sostanze tossiche o radioattive a terra così come in aria. Inoltre, un’ulteriore funzione permetterà di cartografare il terreno contaminato. Tanto il drone quanto il veicolo terrestre sono dotati di due sensori per effettuare questo rilevamento: un sensore misura la radioattività, mentre il secondo è in grado di rilevare diverse sostanze chimiche. Il responsabile di queste attività di ricerca è il dott. Christian Bermes, professore di robotica mobile presso la Scuola universitaria professionale dei Grigioni. Partendo da veicoli robotici già esistenti, assieme al suo team indaga la collaborazione tra i due sistemi, nonché la generazione automatica di una carta dei pericoli. Quest’ultima consente di visualizzare dove e in quale concentrazione sono state riscontrate sostanze pericolose. Il dott. Bermes sottolinea inoltre che parallelamente verrà portato avanti lo sviluppo del veicolo terrestre, in maniera tale che in alcune circostanze sia possibile anche effettuare salvataggi di persone.


ANYmal/Alma– Un prolungamento del braccio umano
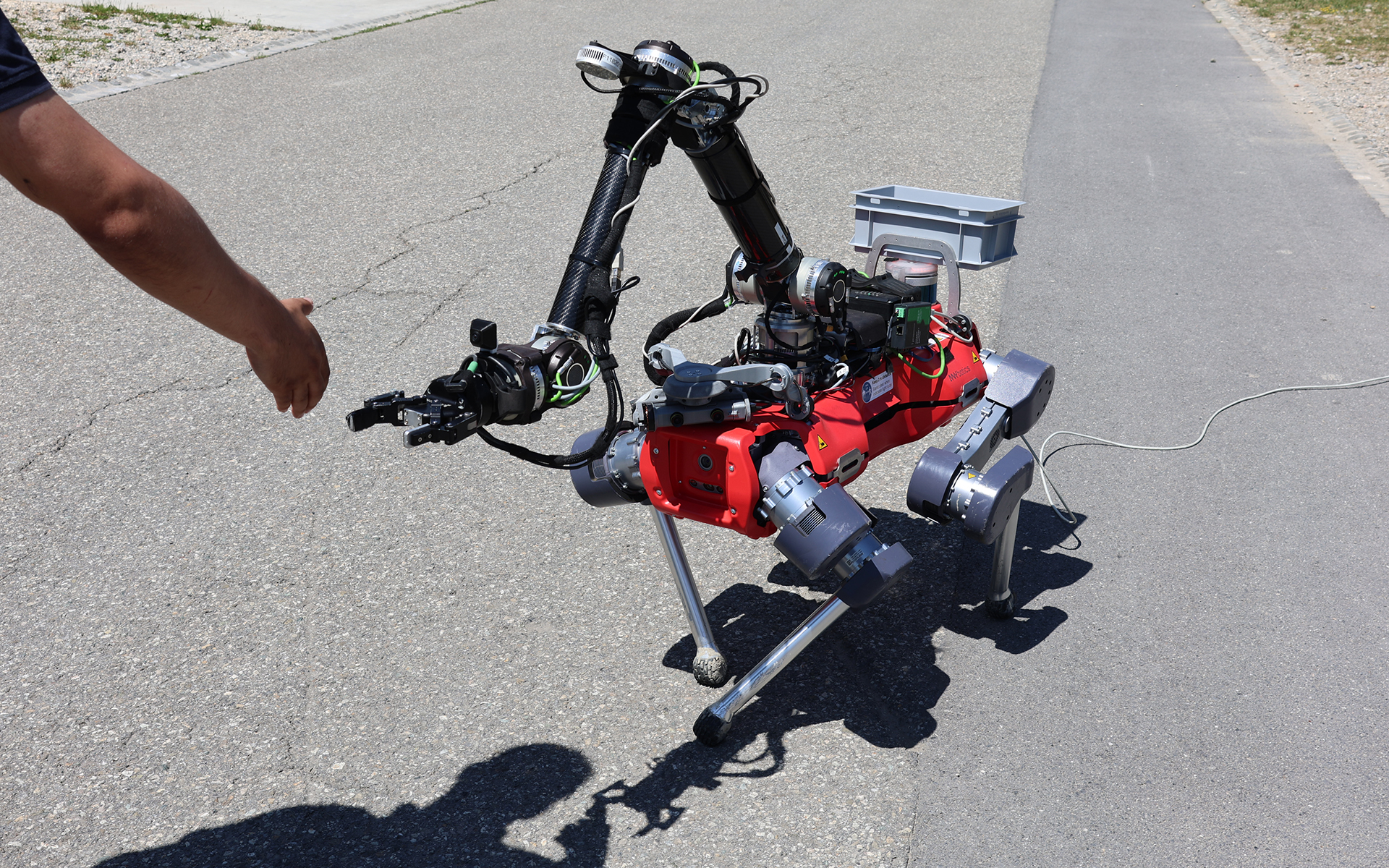
ALMA sta per Articulated Locomotion and Manipulation: si tratta di un sistema del Robotic Systems Lab del Politecnico di Zurigo basato sul robot quadrupede denominato ANYmal. ALMA
dispone di un braccio sviluppato in proprio e di due fotocamere statiche sul lato anteriore. L’obiettivo di questo sistema è quello di riuscire a svolgere tramite il robot compiti in luoghi pericolosi tramite controllo remoto, se non addirittura in maniera automatizzata, per non dover inviare persone nella zona di pericolo. Un possibile uso potrebbe riguardare per esempio i lavori di manutenzione sui reattori nucleari. Attualmente i ricercatori stanno inoltre studiando se il sistema ALMA potrebbe essere impiegato anche nella galleria di base del San Gottardo per l’ispezione automatizzata degli impianti elettrici. Allo stesso modo, è possibile impiegare ALMA per la rimozione delle munizioni inesplose. Per il comando a distanza del braccio è disponibile un’unità di controllo a 360 gradi. L’aspetto peculiare di questa stazione di controllo remoto è la capacità di trasmettere un feedback di forza. L’operatore ha quindi la percezione della pressione con cui afferra l’oggetto e può dunque manipolarlo con grande precisione. Per aumentare ulteriormente lo spettro dei compiti del sistema, la prossima sfida di ALMA consisterà nell’integrazione di un secondo braccio.

RoBoa: il robot serpente
All’evento ARCHE è stata presentata la seconda generazione di RoBoa. Quest’ultimo è un robot simile a un serpente che è in grado da un lato di localizzare le persone sotto alle macerie e dall’altro di fornire loro una prima assistenza (come per esempio acqua, medicamenti o alimenti liquidi) con l’obiettivo di guadagnare tempo per le operazioni di salvataggio.
Le persone sepolte devono poter essere soccorse in modo più rapido, più sicuro e più facile
Il sistema è in fase di sviluppo dal 2019 e attualmente misura 20 metri di lunghezza con un diametro di 10 centimetri. Grazie a questo ridotto fattore di forma, l’apparecchio può
penetrare in luoghi molto stretti, per es. tra le macerie di un edificio collassato. Per permettere a una persona o ad altri apparecchi di raggiungere gli stessi luoghi sarebbero spesso necessari lunghi e complessi lavori di scavo. Sulla «testa» del robot è posta una videocamera 3D con una sorgente luminosa molto potente finalizzata ad agevolare l’individuazione delle persone. Alexander Kübler, co-sviluppatore di RoBoa, definisce la vision del progetto nei seguenti termini: RoBoa vuole rendere più rapido, sicuro e semplice il salvataggio di persone sepolte sotto le macerie. Il prossimo obiettivo sarà quello di ridurre ulteriormente il diametro del robot al fine di penetrare in pertugi ancora più stretti guadagnando in questo modo ancora più tempo per i salvataggi.


Tethys Robotics: il robot subacqueo
Il robot subacqueo Proteus, sviluppato da ricercatori di Tethys Robotics del Politecnico di Zurigo, è in grado di cartografare il fondo di un corpo idrico e può essere utilizzato anche
per azioni di ricerca. Inoltre, il robot può essere equipaggiato con un braccio per sollevare materiale con un peso fino a 5 kg svolgendo in questo modo anche compiti logistici. In aggiunta, sono allo studio le possibili modalità di integrazione di diversi altri sensori o anche di un metal detector. Quest’ultimo è già stato impiegato per supportare i sommozzatori dell’esercito svizzero nella localizzazione di residui di munizioni nei corpi idrici svizzeri. Particolarmente utile per l’orientamento si è rivelata in questo contesto la capacità di riconoscere gli oggetti in tempo reale, così come quella di generare, sempre in tempo reale, una mappatura virtuale del fondo delcorpo idrico.
I corpi idrici devono essere resi più sicuri per tutte le persone. È questo l’obiettivo di Tethys Robotics.» – Andrej Studer, collaboratore scientifico del Politecnico di Zurigo
Una peculiarità del sistema Proteus consiste nel fatto che il robot può essere impiegato anche in acque torbide e mosse. Ciò viene reso possibile dal ricorso a diversi sensori e da algoritmi intelligenti. Con l’aiuto di sonar, velocimetro doppler, sensori di profondità e ulteriori sensori il robot è in grado di mantenere stabile la propria posizione in acqua anche in presenza di correnti. Questi sensori vengono tuttavia impiegati anche per rendere visibili l’ambiente e gli oggetti in tempo reale e per generare una ricostruzione tridimensionale al termine della missione. Andrej Studer, collaboratore scientifico del Politecnico di Zurigo, ha ben chiara la vision a lungo termine del progetto: «rendere i corpi idrici più sicuri per tutte le persone». A suo parere, inoltre, il robot è interessante in particolare anche per la polizia e l’industria.


Gravis Robotics – Macchine pesanti da cantiere senza equipaggio
Gravis Robotics studia il controllo remoto e l’automazione delle macchine pesanti da cantiere. Partito dal Politecnico di Zurigo, il gruppo ha attualmente costituito una start-up e rappresenta un partner di ricerca pluriennale per il CSDR. Le macchine da cantiere, come in particolare un escavatore ragno, non vengono impiegate solo in condizioni normali, ma anche per l’assistenza in caso di catastrofe. Queste macchine sono caratterizzate da una capacità estrema di adattarsi a tutti i terreni, ma di conseguenza risultano al tempo stesso complesse da controllare. Gravis Robotics sviluppa software e pacchetti di sensori per agevolare i comandi, consentendo il controllo remoto o addirittura l’automazione dei compiti. In occasione dell’evento ARCHE di quest’anno i ricercatori si sono occupati dell’automazione dei lavori di scavo. Il loro obiettivo è quello di trasmettere la forma di terreno desiderata alla macchina affinché quest’ultima realizzi poi lo scavo in maniera autonoma. Con l’aiuto di diversi sensori, come fotocamere e telemetri laser, la macchina rileva il terreno e lo spiana secondo la struttura impostata in maniera da sapere poi quanto materiale va rimosso in ciascun punto. Contemporaneamente ai lavori di ricerca per ARCHE, un’altra macchina da cantiere di questo tipo è utilizzata per un impiego effettivo presso la piazza di tiro di Wichlen. Durante i lavori di scavo per il risanamento di quest’ultima si può infatti dare per scontato che ci si imbatterà in pericolosi residui di munizioni o proiettili inesplosi. Per questo motivo l’esercito impiega l’escavatore ragno ARMANO comandato a distanza. I soldati non devono quindi recarsi nella zona di pericolo e possono svolgere i necessari lavori da una distanza di sicurezza.


Strategic Advisory Board
ARCHE ha anche offerto l’occasione per un incontro dello Strategic Advisory Board, il comitato consultivo strategico del Centro svizzero dei droni e della robotica (CSDR) del DDPS. I suoi rappresentanti hanno discusso di sfide e opportunità della robotica di sicurezza, nonché dei potenziali di collaborazione. Su questa base saranno tratte considerazioni per lo sviluppo del CSDR nei prossimi anni.