ARCHE 2023 – Robotik für die Katastrophenhilfe der Zukunft
Vom 10. Bis 14 Juli 2023 fand der Anlass «Advanced Robotic Capabilities for Hazardous Environments», kurz ARCHE, zum ersten Mal in der Romandie bei Avully statt. Hierbei handelt es sich um eine Zusammenarbeit des Schweizer Drohnen- und Robotik-Zentrums (SDRZ) des VBS von armasuisse Wissenschaft und Technologie, des Lehrverbands Genie/Rettung/ABC, sowie der ETH Zürich. Die Plattform ARCHE soll erlauben, Erkenntnisse von robotischen Applikationen zugunsten der Armee und weiterer Behörden mit Sicherheitsaufgaben im Bereich der Katastrophenhilfe zu gewinnen und den Einsatz in diesem Rahmen beurteilen zu können.
Anna Gervasoni und Fabio Winkelmann, Fachbereich Kommunikation, Kompetenzbereich Ressourcen und Support

Dieses Jahr fand bereits die sechste Ausgabe von ARCHE statt. Zum ersten Mal jedoch im Übungsdorf Epeisses bei Genf. Das Übungsdorf der Genie- und Rettungstruppen bietet sich ideal an, um anwendungsorientierte Forschung zu betreiben, die Systeme in realitätsnaher Umgebung zu testen und einen Austausch mit potentiellen Anwendern zu schaffen. Alle zwei Jahre wird ein Demo-Day durchgeführt. An diesem Tag erhalten Anwender aus dem Katastrophenschutz die Möglichkeit, die Aktivitäten und Systeme genauer zu besichtigen. Am Donnerstag, 13. Juli 2023, fand der Demo-Day auf dem Gelände statt Am Vormittag wurden den geladenen Gästen verschiedene Fachreferate zum Thema Robotik vorgetragen. Der Nachmittag dient dazu, dass sich die Gäste sowie weitere Gruppen, wie etwa Medienschaffende, mit den Forschenden austauschen können und die robotischen Systeme auf dem Messegelände in Aktion zu erleben. Im folgenden Beitrag wird auf fünf ausgewählte Systeme eingegangen. Dabei handelt es sich um Forschungsprojekte von armasuisse Wissenschaft und Technologie.
Detektion von Schadstoffen und Rettung von Personen (Bird AI + Boar AI)
Das von der Fachhochschule Graubünden vorgestellte System stellt einen Verbund der Drohne Bird AI und dem Raupenfahrzeug Boar AI dar. Das Ziel ist es, dass Drohne und Fahrzeug im Zusammenspiel so agieren, dass beispielsweise Giftstoffe oder radioaktive Stoffe am Boden wie auch in der Luft aufgespürt werden können. Zudem soll es möglich sein, den kontaminierten Boden zu kartographieren. Die Drohne wie auch das Bodenfahrzeug sind mit zwei Sensoren für diese Detektion ausgestattet: Ein Sensor misst die Radioaktivität und der zweite ist in der Lage, verschiedene chemische Stoffe aufzuspüren. Dr. Christian Bermes, Professor für mobile Robotik an der Fachhochschule Graubünden, ist zuständig für diese Forschungsaktivitäten. Dabei setzen er und sein Team auf bestehende robotische Vehikel und untersuchen damit die Kooperation der zwei Systeme, sowie das automatisierte Erstellen einer Gefahrenkarte. Dies ist eine Karte, auf welcher ersichtlich wird, wo und welche Konzentrationen der Gefahrenstoffe gemessen wurden. Er betont auch, dass parallel dazu die Entwicklung des Bodenfahrzeugs so weit gehen soll, dass unter Umständen auch Personenrettungen vorgenommen werden können.


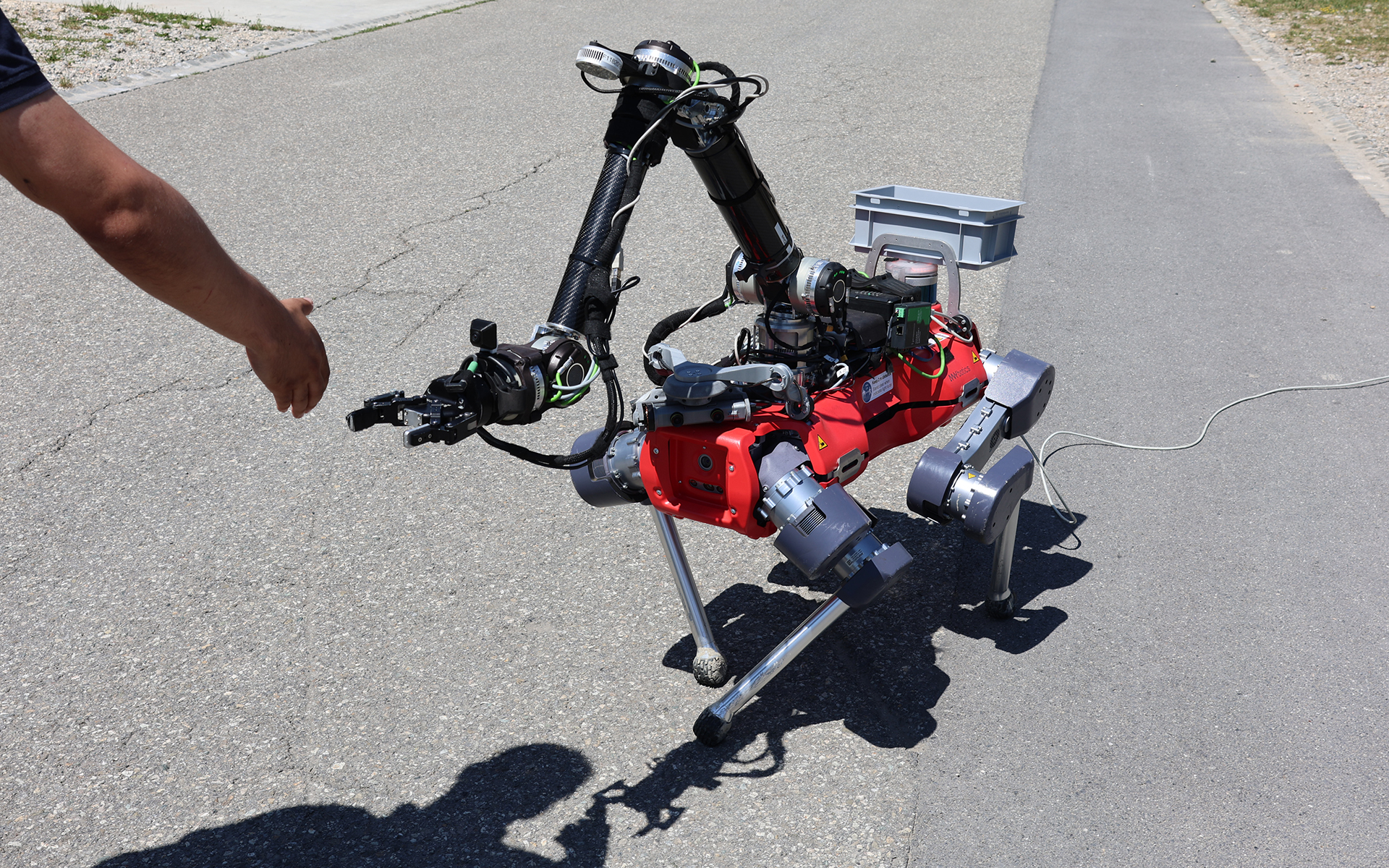
ANYmal/Alma– Der verlängerte Arm des Menschen
ALMA steht für Articulated Locomotion and Manipulation und ist ein System aus dem Hause des Robotic Systems Lab der ETH Zürich. Es basiert auf dem vierbeinigen Roboter namens ANYmal. ALMA ist mit einem selbst entwickelten Arm und zwei statischen Kameras auf der Vorderseite ausgestattet. Das Ziel dieses Systems ist es, mit dem Roboter an gefährlichen Orten fernbedient oder auch automatisiert Aufgaben ausführen zu können, um den Menschen nicht in die Gefahrenzone schicken zu müssen. Vorstellbar wären beispielsweise Wartungsarbeiten an Kernreaktoren. Derzeit untersuchen die Forschenden zusätzlich ob ALMA auch am Gotthardtunnel
zur automatisierten Inspektion von Stromanlagen eingesetzt werden kann. Ebenfalls kann ALMA für die Beseitigung von Kampfmitteln eigesetzt werden. Für die Fernbedienung des Arms, steht eine 360-Grad-Steuerung zur Verfügung. Speziell an dieser Fernbedienstation ist die Fähigkeit, ein Kraftfeedback zu übertragen. Der Bediener erhält ein Gefühl, mit wieviel Druck er Objekt greift und kann Objekte so sehr präzise manipulieren. Um das Aufgabenspektrum des Systems weiter zu erhöhen, besteht die künftige Herausforderung für ALMA darin, einen zweiten Arm in das System zu integrieren.

RoBoa: Der schlangenartige Roboter
Am ARCHE-Event wurde die zweite Generation von RoBoa vorgestellt. RoBoa ist ein schlangenähnlicher Roboter, der einerseits Menschen unter Trümmern lokalisieren und andererseits eine gewisse Erstversorgung wie etwa mit Wasser, Medikamenten oder Flüssignahrung versorgen kann. Dies mit dem Ziel Zeit für die Rettung zu gewinnen.
Verschüttete Menschen sollen schneller, sicherer und einfacher gerettet werden.
Seit 2019 befindet sich das System in Entwicklung und ist aktuell 20 Meter lang, mit einem Durchmesser von 10 Zentimetern. Durch diesen kleinen Formfaktor kann das Gerät in sehr enge Bereiche eindringen wie z. B. in die Trümmer eines kollabierten Gebäudes. Um die gleichen Orte als Mensch oder mit anderen Geräten zu erreichen, sind oft sehr aufwendige und zeitintensive Grabarbeiten notwendig. Vorne am «Kopf» des Roboters ist eine 3D-Kamera mit einer sehr starken Lichtquelle angebracht. Sie soll das Auffinden der Personen erleichtern. Alexander Kübler, Mitentwickler von RoBoa, sieht die Vision von seinem Projekt darin, dass RoBoa die Rettung von Menschen unter Trümmern schneller, sicherer und einfacher machen soll. Dabei soll das nächste Ziel sein, den Durchmesser des Roboters weiter zu reduzieren, um noch engere Lücken zu erreichen und dadurch noch mehr Zeit für Rettungen zu gewinnen.


Tethys Robotics: Der Unterwasser-Roboter
Der von Tethys Robotics, Forschende der ETH Zürich, entwickelte Unterwasserroboter Proteus, kann den Boden eines Gewässers kartographieren und ebenfalls für Suchaktionen verwendet werden. Weiter kann der Roboter mit einem Arm ausgestattet werden, um Material mit einem Gewicht von bis zu 5 kg anzuheben und so auch Logistikaufgaben wahrzunehmen. Zusätzlich wird untersucht, wie verschiedene weitere Sensoren oder auch ein Metalldetektor integriert werden können. Letzterer wurde bereits eingesetzt, um die Kampfmitteltaucher der Schweizer Armee beim Lokalisieren von Munitionsrückständen in Schweizer Gewässern zu unterstützen. Besonders hilfreich für die Orientierung war dabei die Fähigkeit, Objekte in Echtzeit zu erkennen, sowie ebenfalls in Echtzeit eine virtuelle Kartierung des Gewässerbodens zu erstellen.
Gewässer sollen sicherer für alle Menschen werden. Dafür setzt sich Tethys Robotics ein.
Eine Besonderheit von Proteus besteht darin, dass der Roboter in trüben und unruhigen Gewässern eingesetzt werden kann. Ermöglicht wird dies durch den Einsatz verschiedener Sensoren und intelligenter Algorithmik. Mit Hilfe von Sonar, Doppler-Velocity-Meter, Tiefensensoren und weiteren Sensoren kann der Roboter seine Lage im Wasser auch in Strömungen stabil halten. Die Sensoren werden jedoch auch dazu eingesetzt, die Umgebung und Objekte in Echtzeit sichtbar zu machen und im Anschluss an eine Mission eine 3D-Rekonstruktion zu erstellen.Für Andrej Studer, wissenschaftlicher Mitarbeiter der ETH Zürich ist klar, dass es die langfristige Vision des Projekts ist, die «Gewässer sicherer für alle Menschen zu machen». Er führt weiter aus, dass der Roboter insbesondere auch für die Polizei und die Industrie interessant ist.


Gravis Robotics – unbemannte schwere Baumaschinen
Gravis Robotics untersucht die Fernbedienung und Automatisierung von schweren Baumaschinen. Gestartet an der ETH Zürich ist die Gruppe unterdessen ein Start-Up und langjähriger Forschungspartner des SDRZ. Baumaschinen, wie insbesondere ein Schreitbagger, werden nicht nur in normalen Lagen, sondern auch zur Katastrophenhilfe eingesetzt. Dabei zeichnen sich solche Bagger durch eine extrem hohe Geländegängigkeit aus; entsprechend komplex ist jedoch auch die Bedienung dieser Systeme. Gravis Robotics entwickelt Software und Sensorpakete, um diese Bedienung zu erleichtern, fernbedient oder gar automatisiert zu ermöglichen. An der diesjährigen ARCHE arbeiteten die Forschenden an der Automatisierung von Grabarbeiten. Das Ziel soll es sein, der Maschine eine gewünschte Geländeform vorzugeben, welche sie anschliessend selbständig ausgräbt. Mit Hilfe von verschiedenen Sensoren wie Kameras und Laser-Distanzmessern erfasst die Maschine das Gelände und gleicht dieses mit der vorgegebenen Geländestruktur ab, um anschliessend zu wissen, wo wieviel Material entfernt werden muss. Zeitgleich zu den Forschungsarbeiten an ARCHE wird eine weitere solche Baumaschine auf dem Schiessplatz Wichlen in einem Ernsteinsatz eingesetzt. Bei der Sanierung des Schiessplatzes kann davon ausgegangen werden, dass bei Grabarbeiten auf gefährliche Munitionsüberreste oder Blindgänger gestossen wird. Deshalb setzt die Armee den Schreitbagger ARMANO fernbedient ein. Die Soldaten müssen sich so nicht in die Gefahrenzone begeben und können die notwendigen Arbeiten aus sicherer Distanz ausführen.


Strategic Advisory Board
ARCHE bot auch die Gelegenheit, zum Austausch des strategischen Beratungsgremiums des Schweizer Drohnen- und Robotik-Zentrums des VBS (SDRZ), dem Strategic Advisory Board. Dessen Vertreterinnen und Vertreter diskutierten Herausforderungen und Chancen der Sicherheitsrobotik und Potentiale der Zusammenarbeit. Daraus werden Erkenntnisse für die Weiterentwicklung des SDRZ in den kommenden Jahren abgeleitet.